
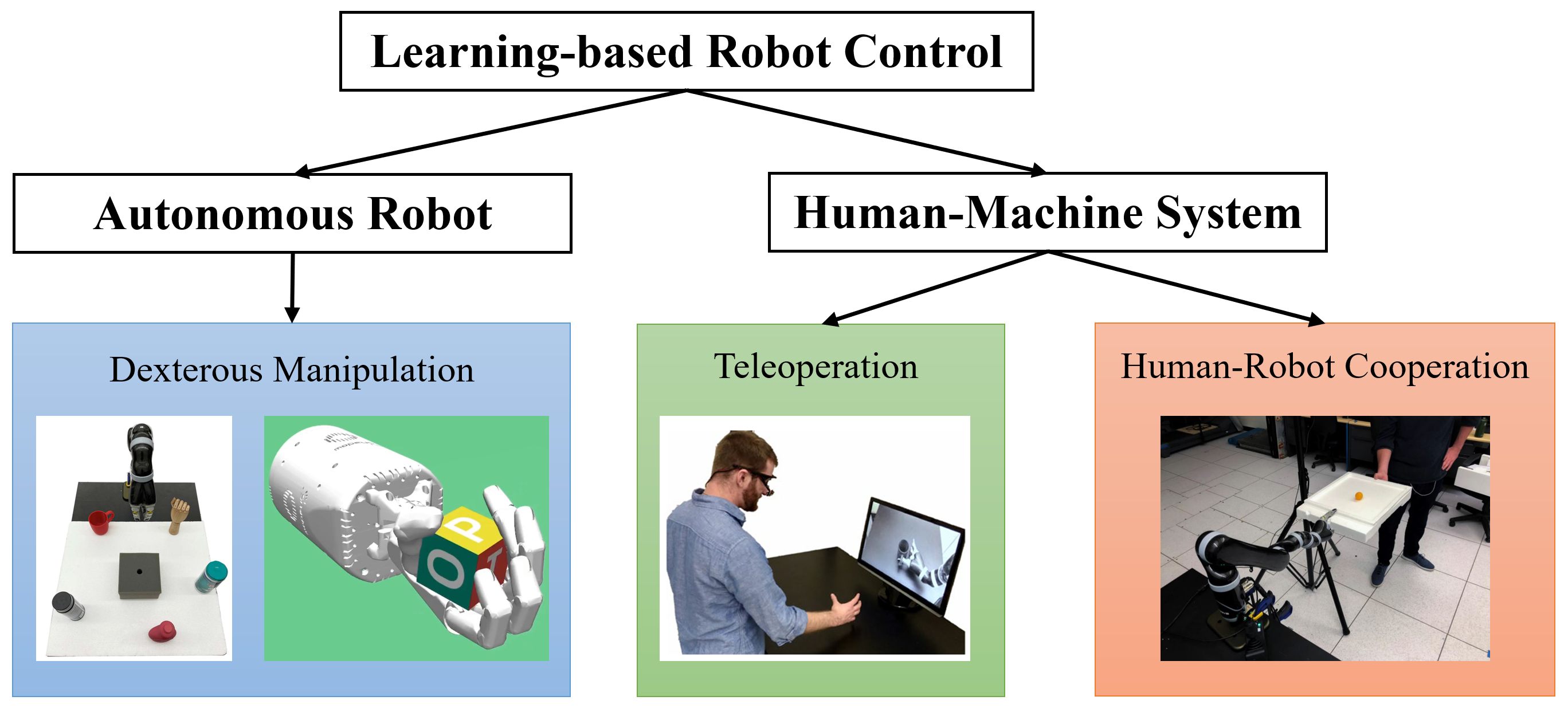
MRI lab’s research is generally in the areas of Learning-Based Robot Control, mainly Autonomous Robot, and Human-Machine Systems, with a focus on improving the learning capability and intelligence of the robot to autonomously complete dexterous manipulation tasks or adapt and cooperate with the human operator naturally and intuitively. Thus far, the research applications include 1) Semi-autonomous Telemanipulation, investigating the methodology to convey the human command to the robot with intuitive motion mapping through autoencoder, enabling the robot to provide active assistance based on the human preference, and transferring such assistive knowledge between different robots, 2) Human-Robot Cooperation (HRC): investigating the learning strategies to establish cooperation between the robot and the human, and improve the cooperation performance and task performance in HRC, 3) Learning-Based Dexterous Manipulation, improve the intelligence and capability of the autonomous robot with adaptive hierarchical curriculum and multi-agent approaches in complex tasks, such as multi-phase multi-objective manipulation and multi-finger dexterous in-hand manipulation.
201 total views , 2 views today